开yun体育网 一天时间,中国汽车齐千里浸在“全国第一”里。小米SU7 Ultra,用真刀真枪的6分46秒874,拿下了纽北最速四门车,成为了全国第一;小鹏汽车,说我方从智驾到企业立场,齐和马斯克的特斯拉一样,天然,也有东谈主聘用不言语。本年10月25日,华为智能汽车惩处有盘算推算不动声色的发布了ADS Pro V3.1版块,以至在次日还速即开启了V3.2 beat的内测体验,从之前的ADS 3.0智驾效率看,其实就一经相配接近启程点自动驾驶了,而新版块在这基础上,又优化了对细节的感知才调,也
 开yun体育网
开yun体育网
一天时间,中国汽车齐千里浸在“全国第一”里。小米SU7 Ultra,用真刀真枪的6分46秒874,拿下了纽北最速四门车,成为了全国第一;小鹏汽车,说我方从智驾到企业立场,齐和马斯克的特斯拉一样,天然,也有东谈主聘用不言语。本年10月25日,华为智能汽车惩处有盘算推算不动声色的发布了ADS Pro V3.1版块,以至在次日还速即开启了V3.2 beat的内测体验,从之前的ADS 3.0智驾效率看,其实就一经相配接近启程点自动驾驶了,而新版块在这基础上,又优化了对细节的感知才调,也新增了不少更类东谈主的决策,总之,举座的功能框架在完成车位到车位这类操作上愈加开放了,参考其他品牌的智驾节点,下个月会有逸想500万CLIPS的6.4新模子,小鹏纯视觉5.4、小米新版NOA、智己大限度推开的momenta等等,为什么说华为ADS Pro V3.2更值得全球期待呢?

踩错踏板也能刹停,靠的是LiDar+AEB?
先走动来一下华为乾崑智驾ADS V3.0的功能效率,在拿掉BEV网罗之后,细腻感知的GOD网罗和细腻瞻望决判的PDP网罗,在激光雷达、4D毫米波雷达这类感知硬件的衔尾下,不错全天候对谈路细节作念到感知,比如会看红绿灯、会过闸机、运行场景不受遣散,遭遇鬼探头不会一会儿一脚刹停,在复杂路口或者交错环岛的通行率也有一定的保证,但作念了出于安全冗余考虑,系统在这类场景多数照旧会主动左迁到LCC,而在最新的版块中,ADS Pro V3.1和V3.2 beat齐优化了这类细节,收受率和执行决策齐作念到了更低、更类东谈主,除了这些,新版块还在哪些方面有显著进步?

从实测体验遣散来看,ADS Pro V3.1和V3.2 beat优化了几处功能,包括NCA路口通行,低风险缩小启程点告诫频次、学习代客泊车路子,导航试图分频走漏、雷达讳饰提醒、识别井盖等。这其中,启程点告诫不再时时时就一会儿弹出来,而是系统在判定当下智驾场景风险不高的时候,会一直处于静默状况,从某种道理上讲,这个功能的出现险些讲明华为一经无穷接近到了L3,下一步要作念的就是接着优化在高风险场景下的决策才调,像在拥挤加塞、东谈主车混行的复杂路口,整套系统的处理机制不再显得幼稚,而是伺隙加塞或聘用绕行,这个执行效率就相配拟东谈主,以至是在窄路会车或者U型掉头时,系统还会把柄与周围窒碍物的距离,聘用多打半圈宗旨盘,增大转弯半径幸免发生剐蹭。

比较故好奇的是新增的几个功能,具体是NCA靠边临停,路面自适当防碰撞,横穿防碰撞逃匿、误踩加快踏板识别以及误挂挡防碰撞,在之前的版块之中,当导飞翔将到达方针地时(尤其瑕瑜泊车场场景),系统会跳出界面领导必须由东谈主工收受泊车,此次的优化就是惩处了临了这部分的东谈主类驾驶员操作,平直让车辆自主靠边泊车,而在“防碰撞”的几个功能当中,基本齐是GOD网罗诊治AEB发挥了作用,比如当感知硬件发现路面黏遵守不高的时候,系统会提前触发AEB,随时进行重刹,之前一直有提到的预判鬼探头,更多的其实是针对静止窒碍物所完成的判断,比如双向骨干谈一会儿蹿出的行东谈主或电瓶车,在察觉到谈路危境后一经住手了辅导轨迹,优化之后预判的底层逻辑不变,变的是不错在谈内或借谈要紧避障,天然了,华为也给这项功能作念了安全冗余,唯有在低速加塞场景之下,才能触发横穿/斜穿防碰撞。
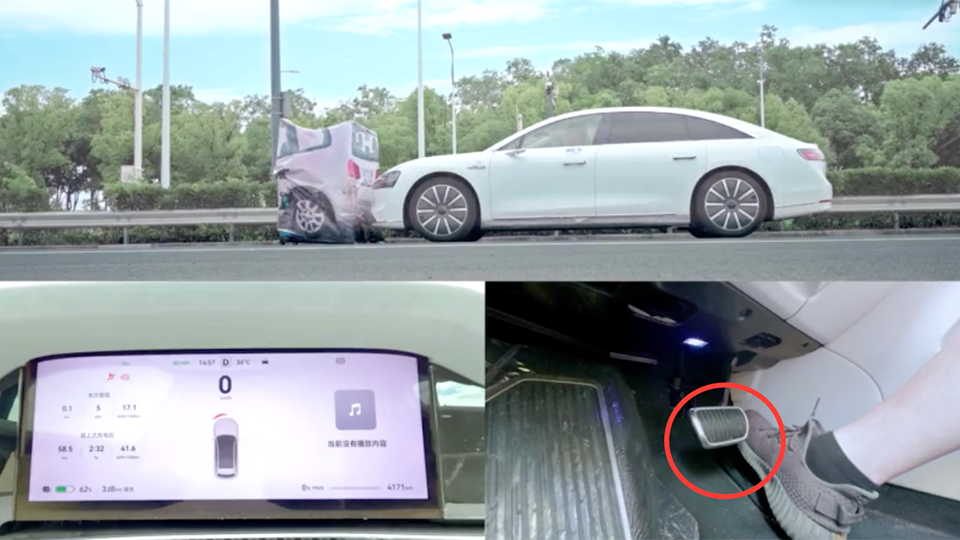
误踩踏板防碰撞有必要单独拿出来聊。前几年,车主对新动力汽车的单踏板花样争议许久,大部分车主以为有肖似制动效率的加快踏板,在张惶中难以区别我方是否一经接管制动,是以宽敞会误踩踏板发生剐蹭,当今看这个问题其实很好惩处,在端到端的智驾花样下,不错给大模子熟习特定场景,或者平直给它章程,当传感器识别到一经波及碰撞危境距离时,平直诊治AEB进行制动,是以即就是驾驶员依然踩着加快踏板,车辆也能刹停,不论是走纯视觉路子照旧多传感器路子的智驾有盘算推算,这个功能其实齐是不错完好意思的。

值得一提的是,华为在10月25日发布ADS Pro V3.1,次日就推送了V3.2 beat内测,这似乎讲明V3.1版块还不够“齐全”,从3.1版块的多个实测体验来看,比起内测版块最显著的区别,是后者智驾经过破耗的时间更少,同期收受率也更低,也就是说,内测版在细节处理上的决策机制,显著要显得更忠良一些,比如在最磨真金不怕火博弈才调的环岛或复杂路口,在莫得自动左迁的情况下,雷同是濒临移动窒碍物,3.1版块在考虑聘用礼让照旧借到绕行的时间,齐要比内测版块慢上几秒,是以提议后期平直升级到V3.2郑再版。
无穷接近L3级,唯有华为GOD大网作念的最佳?
前边提到,误踩踏板防碰撞两大智驾有盘算推算齐不错完好意思,但要是终止来讲,有激光雷达安全冗余度确定更高一些,毕竟,这种处理有盘算推算需要对环境进行及时扫图然后交给大模子去透露,不外在复杂路口环境下,可能会导致系统需要更多的处理时间和算力,这就引出新的想考了,关于莫得激光雷达的纯视觉有盘算推算,把算力堆上去是不是也能更好的惩处?

谜底天然是确定的,算力储备高就意味着大模子在单元时间内,处理数据的速率不错更快,这亦然促进AI学习和熟习的基础,天然激光雷达如实会占用一部分算力,把感知数据运送给智心也需要时间,然则这个缺欠不错通过优化预判决策网罗给弥补掉,引出几个数据行动参考,智己momenta云表算力唯有2.5 E FLOPS,逸想汽车为4.5E FLOPS,华为乾崑智驾目下有5E FLOPS,小鹏来岁会从2.51E FLOPS拓展到10E FLOPS,而特斯拉则高达35E FLOPS,换句话说,激光雷达的出现,其实是不需要太高云表算力的,而纯视觉有盘算推算正巧反了过来,可能有东谈主不睬解了,高算力是不是就等于智驾才调强呢?

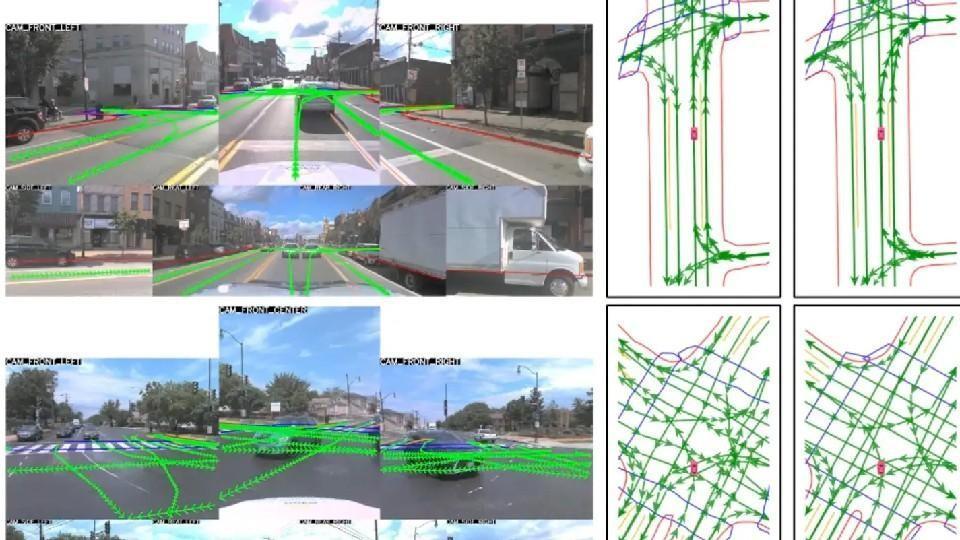
并不是,算力只是指芯片每秒粗略执行的运算次数,而算法才是自动驾驶的中枢,特斯拉FSD就是一个典型的端到端算法,本年转向AI鹰眼的小鹏亦然肖似的逻辑,齐是需要用虚耗的实测视频熟习神经网罗,感知层面的数据开端只是是靠录像头来完成,而前两天智己发布的momenta,底层逻辑天然亦然如出一辙,然则感知元件多了一颗激光雷达,是以这就不错很好透露了,纯视觉智驾有盘算推算需要无数的算力,也需要不断进化的大模子算法,优点是系统的驾驶行为不错学习东谈主类驾驶员的民风,筹划任务相对精简,级联瑕疵减少之后,数据驱动更容易发挥限度规章,缺欠也就很平直了,就是需要堆更高的算力储备和强化算法。
比拟之下,现阶段华为的GOD+PDP有盘算推算,其实上风要更多一些,就拿最容易出现左迁的复杂路口来说,从GOD+AEB的分段式架构变成GOD一张大网,平直就免却了正本数据传递经过中需要的时间和算力,以至是旅途的博弈,而BEV网罗存在之前,系统是需要将通盘场景对上窒碍物的坐标,然后还要对每个窒碍物单独去作念辅导轨迹分析和预判,这些齐需要筹划的资本和时间,如果在数据分析量雄壮的复杂环岛,BEV网罗就会出现数据分析过慢、运送蔓延,直到过载导致左迁转为东谈主工收受,是以去掉BEV融入GOD网罗,不错不再单给辅导窒碍物分析坐标,平直瞻望它的轨迹旅途就不错了,平凡少量来讲,道理其实和分段式架构并成一张大网是一样的,而完好意思这些的前提,齐是需要大网具备复杂路况的数据透露才调解处理才调。

再有就是感知硬件上的才调了,4D毫米波雷达通过回波不错对小体积的异性窒碍物组成立体模子,华为我方的192线激光雷达亦然用更多的激后光束对谈路细节及时扫图,齐是给GOD大网提供数据愈加精准的原始数据模子,是以从某种进程上讲,取消BEV网罗亦然给高精雷达传感器的性能走动“松捆”,具体到效率层面上看,最多两把就能泊入车位的自主泊车功能就是最佳的例子。

总结一下,从2021年发布ADS 1.0,到2023年引入GOD网罗见识,再到2024年酿成由GOD+PDP组成的一张大网惩处总共功能,华为的这套乾崑智驾有盘算推算,其真的3.0版块的期间就基本摸到了L3级自动驾驶的门槛了,是以在这套系统之后,华为只需要再优化一些处理机制上的细节,进步一些决策执行的速率开yun体育网,能和数据累积量极其雄壮的特斯拉FSD抗衡,不出就怕的话其完好意思在就唯有华为了。
www.vippc-wx.cn
45231772@outlook.com

16166737805
资讯世界科技园4427号